|
|
v2.0.0
|
Loading...
Searching...
No Matches
|
|
v2.0.0
|
HPI (Head Position Indicator) fitting — estimates the MEG dewar-to-head transform from coil-current signals. More...
#include "../inv_global.h"#include <fiff/fiff_ch_info.h>#include "inv_sensor_set.h"#include "inv_signal_model.h"#include <fiff/fiff_dig_point_set.h>#include <fiff/fiff_dig_point.h>#include <fiff/fiff_coord_trans.h>#include <Eigen/Core>#include <Eigen/Geometry>#include <QSharedPointer>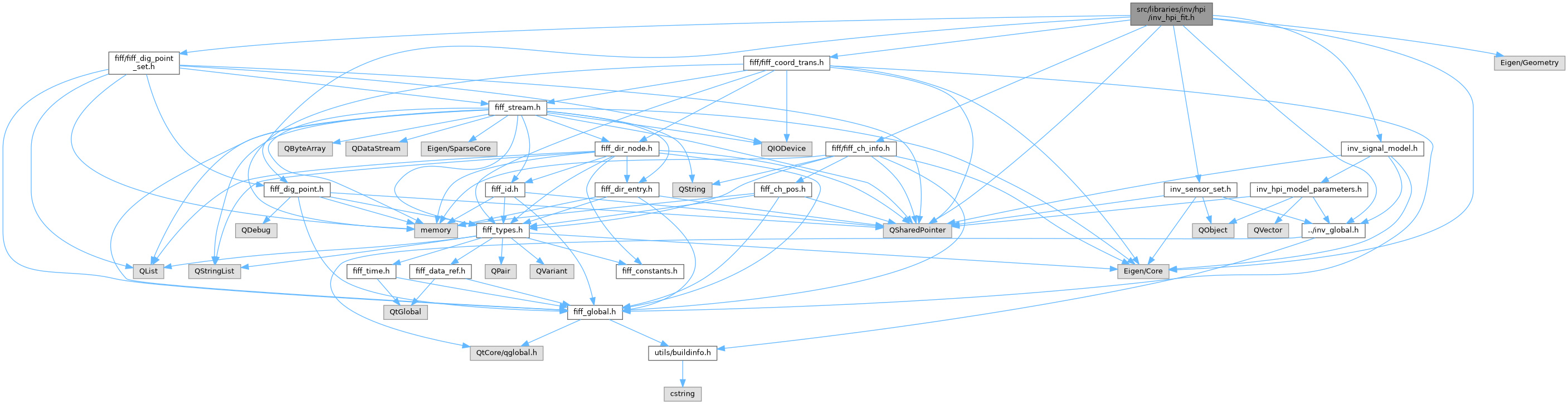
Go to the source code of this file.
Classes | |
| struct | INVLIB::CoilParam |
| Estimated dipole parameters (position, moment, goodness-of-fit) for a single HPI coil. More... | |
| struct | INVLIB::HpiFitResult |
| Complete HPI fit output: per-coil dipole parameters, head-to-device transform, fit error, and head movement distance. More... | |
| class | INVLIB::InvHpiFit |
| Drives one HPI fit (per-coil dipole localisation, coil ordering, dewar-to-head transform). More... | |
Namespaces | |
| namespace | FWDLIB |
| Forward modelling — BEM solver, spherical models, sensor/coil definitions and the lead-field assembly that links current dipoles to MEG/EEG sensor readings. | |
| namespace | FIFFLIB |
| FIFF file I/O, in-memory data structures and high-level readers/writers. | |
| namespace | INVLIB |
| Inverse source estimation (MNE, dSPM, sLORETA, dipole fitting). | |
Macros | |
| #define | metatype_HpiFitResult |
HPI (Head Position Indicator) fitting — estimates the MEG dewar-to-head transform from coil-current signals.
SPDX-License-Identifier: BSD-3-Clause Copyright (c) 2026 MNE-CPP Authors
INVLIB::InvHpiFit fits a magnetic dipole to each HPI coil from the projected MEG data, matches the fitted coils to the digitised coil locations and returns the resulting dewar↔head coordinate transform. The class drives the same pipeline used by Elekta/MEGIN MaxFilter and mne-python's mne.chpi: per-coil dipole localisation, frequency ordering, large-movement detection and quaternion-formatted position storage. Inputs are the projected sensor data, the SSP projector and an InvHpiModelParameters spec; output is an HpiFitResult that downstream stages can feed to head-movement-corrected averaging or continuous co-registration.
Definition in file inv_hpi_fit.h.
| #define metatype_HpiFitResult |
Definition at line 381 of file inv_hpi_fit.h.