|
|
v2.0.0
|
Loading...
Searching...
No Matches
|
|
v2.0.0
|
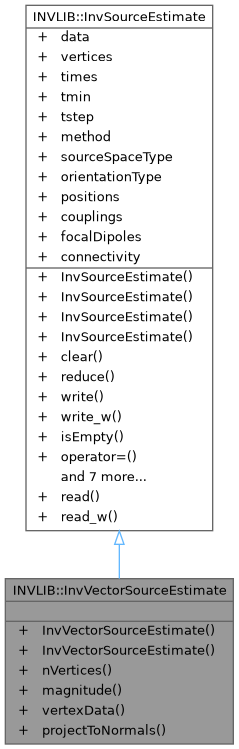
Vector source estimate: each vertex carries a 3D orientation vector across time. More...
#include <inv_vector_source_estimate.h>
Public Types | |
| typedef QSharedPointer< InvVectorSourceEstimate > | SPtr |
| typedef QSharedPointer< const InvVectorSourceEstimate > | ConstSPtr |
| Public Types inherited from INVLIB::InvSourceEstimate | |
| typedef QSharedPointer< InvSourceEstimate > | SPtr |
| typedef QSharedPointer< const InvSourceEstimate > | ConstSPtr |
Public Member Functions | |
| InvVectorSourceEstimate () | |
| InvVectorSourceEstimate (const Eigen::MatrixXd &p_sol, const Eigen::VectorXi &p_vertices, float p_tmin, float p_tstep) | |
| int | nVertices () const |
| InvSourceEstimate | magnitude () const |
| Eigen::MatrixXd | vertexData (int vertexIdx) const |
| InvSourceEstimate | projectToNormals (const Eigen::MatrixX3f &normals) const |
| Public Member Functions inherited from INVLIB::InvSourceEstimate | |
| InvSourceEstimate () | |
| InvSourceEstimate (const Eigen::MatrixXd &p_sol, const Eigen::VectorXi &p_vertices, float p_tmin, float p_tstep) | |
| InvSourceEstimate (const InvSourceEstimate &p_SourceEstimate) | |
| InvSourceEstimate (QIODevice &p_IODevice) | |
| void | clear () |
| InvSourceEstimate | reduce (qint32 start, qint32 n) |
| bool | write (QIODevice &p_IODevice) |
| void | write_w (const QString &path) const |
| bool | isEmpty () const |
| InvSourceEstimate & | operator= (const InvSourceEstimate &rhs) |
| int | samples () const |
| Eigen::VectorXi | getIndicesByLabel (const QList< FSLIB::FsLabel > &lPickedLabels, bool bIsClustered) const |
| bool | hasGridData () const |
| bool | hasCouplings () const |
| bool | hasFocalDipoles () const |
| bool | hasPositions () const |
| bool | hasConnectivity () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from INVLIB::InvSourceEstimate | |
| static bool | read (QIODevice &p_IODevice, InvSourceEstimate &p_stc) |
| static InvSourceEstimate | read_w (const QString &path) |
| Public Attributes inherited from INVLIB::InvSourceEstimate | |
| Eigen::MatrixXd | data |
| Eigen::VectorXi | vertices |
| Eigen::RowVectorXf | times |
| float | tmin |
| float | tstep |
| InvEstimateMethod | method |
| InvSourceSpaceType | sourceSpaceType |
| InvOrientationType | orientationType |
| Eigen::MatrixX3f | positions |
| std::vector< InvSourceCoupling > | couplings |
| std::vector< InvFocalDipole > | focalDipoles |
| std::vector< InvConnectivity > | connectivity |
Vector source estimate: each vertex carries a 3D orientation vector across time.
data has shape (n_vertices*3 x n_times). Rows are interleaved: [x0,y0,z0, x1,y1,z1, ...]. Use magnitude() to collapse to scalar (n_vertices x n_times) for visualisation.
Definition at line 45 of file inv_vector_source_estimate.h.
| typedef QSharedPointer<const InvVectorSourceEstimate> INVLIB::InvVectorSourceEstimate::ConstSPtr |
Definition at line 49 of file inv_vector_source_estimate.h.
| typedef QSharedPointer<InvVectorSourceEstimate> INVLIB::InvVectorSourceEstimate::SPtr |
Definition at line 48 of file inv_vector_source_estimate.h.
| InvVectorSourceEstimate::InvVectorSourceEstimate | ( | ) |
Definition at line 42 of file inv_vector_source_estimate.cpp.
| INVLIB::InvVectorSourceEstimate::InvVectorSourceEstimate | ( | const Eigen::MatrixXd & | p_sol, |
| const Eigen::VectorXi & | p_vertices, | ||
| float | p_tmin, | ||
| float | p_tstep ) |
Construct from data and vertices.
| [in] | p_sol | Data (n_vertices*3 x n_times). |
| [in] | p_vertices | Vertex indices (n_vertices). |
| [in] | p_tmin | Start time. |
| [in] | p_tstep | Time step. |
| InvSourceEstimate InvVectorSourceEstimate::magnitude | ( | ) | const |
Compute the magnitude (L2 norm) at each vertex across time.
Definition at line 67 of file inv_vector_source_estimate.cpp.
| int InvVectorSourceEstimate::nVertices | ( | ) | const |
Number of source vertices (data.rows() / 3).
Definition at line 60 of file inv_vector_source_estimate.cpp.
| InvSourceEstimate InvVectorSourceEstimate::projectToNormals | ( | const Eigen::MatrixX3f & | normals | ) | const |
Project the 3D vectors onto surface normals to produce a signed scalar estimate.
| [in] | normals | Surface normals (n_vertices x 3). |
Definition at line 97 of file inv_vector_source_estimate.cpp.
| MatrixXd InvVectorSourceEstimate::vertexData | ( | int | vertexIdx | ) | const |
Extract the (x, y, z) data for a specific vertex.
| [in] | vertexIdx | Local index into vertices array. |
Definition at line 87 of file inv_vector_source_estimate.cpp.